 |
Networked Robotic Systems Laboratory |
| |
Networked Robotic Systems Laboratory |
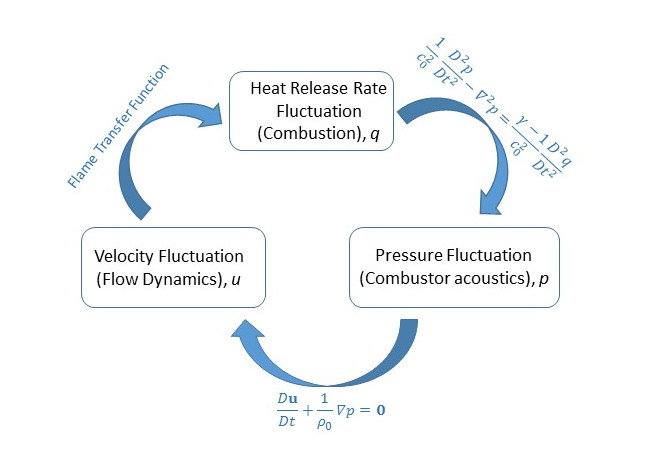
This is a fundamental research project that deals with data-driven perception and modeling of combustion instabilities in lean pre-mixed combustion systems.
The goal of the research is to develop advanced data analytics tools to detect and predict impending instability in combustion systems for active control of undesirable instabilities in these systems.
The research project has been able to achieve several breakthroughs in data-driven analytics for combustion systems using advanced techniques like Deep Learning, Markov Modeling and Gaussian Processes.
The current focus of the research project is to use the advanced analytics tools like Deep Learning to alleviate the complexity of non-linear models for real-time accurate prediction in these systems.
This is a fundamental research project that aims to develop machine intelligence techniques to develop smart distributed sensor networks for border control.
This goal of this project is to model border control as a dynamic data-driven adaptive systems where the data-driven models are used to model and predict events of interest over a smart border fence.
So far the research project has been able to achieve several breakthroughs in context-aware sensing, multi-modal sensor fusion and non-parametric density estimation techniques.

This is a fundamental research project focused on motion planning and control of robotics systems with applications to several complex problems related to urban autonomous driving.
The goal of this project is to be able to develop a complex architecture for next-generation transportation systems by bringing together motion planning, game-theoretic control, statistical learning & estimation theory.
So far, the research has addressed sevral complex problems in motion planning like feedback motion planning and control, game-theoretic multi-robot motion planning and planning with learning.
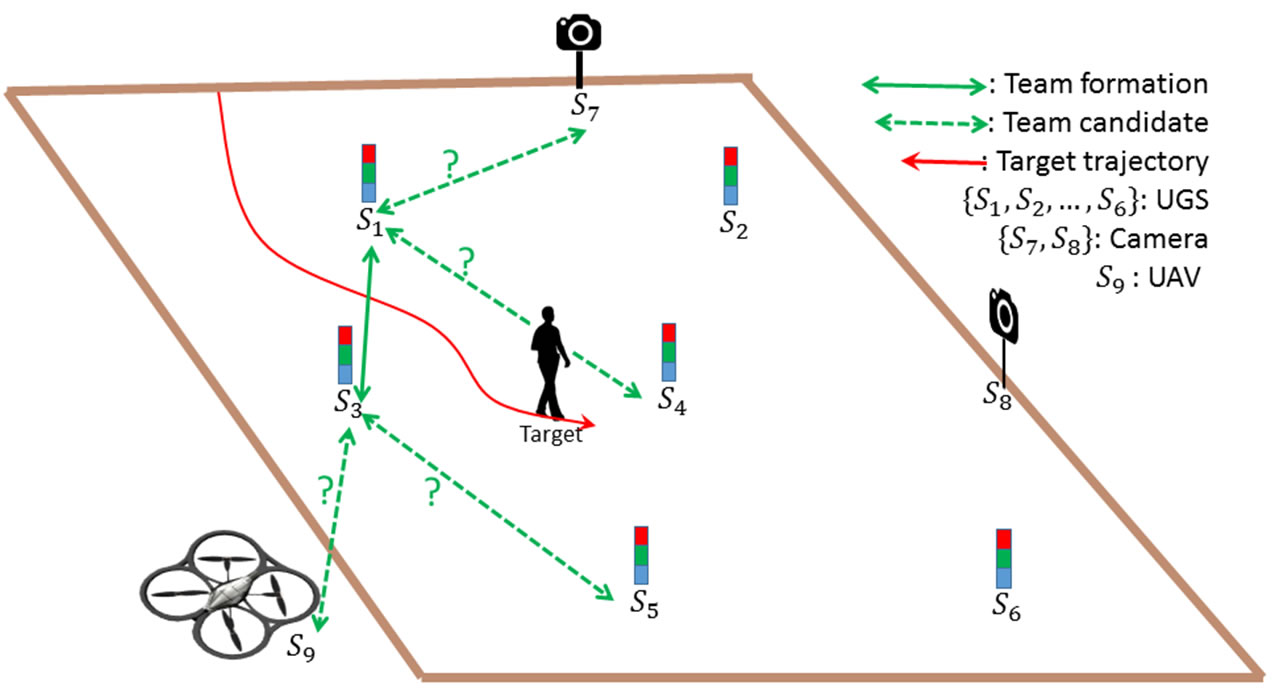
The goal of this project is to develop a state-of-the-art test-bed to serve as the primary apparatus for validating algorithms of target detection, classification, and tracking of mobile targets (e.g., robots) by deploying sensor arrays in both indoor and outdoor environments.
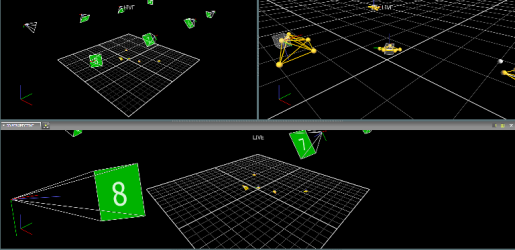
The developed test-bed at NRSL consists of multi-modal sensor nodes, local command & control (C2) hub nodes, and a central hub for emulation of mission visualization by human operators.
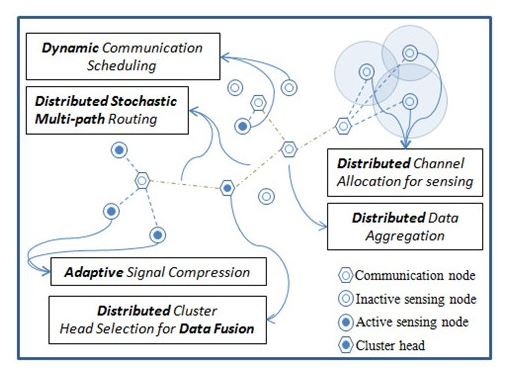
The broad scope of this research is to optimally manage resources for communication across the network in a distributed fashion to make it long-lasting while simultaneously adding proactive and reactive recovery properties. In addition, goal is also to reduce communication overhead at individual sensors by extracting sufficient statistics from sensed signal with limited computation and optimally trigger communication based on event occurrence statistics.
1. Dynamic Communication Scheduling: Algorithm development for event-triggered communication at a sensor based on event observation history and network configuration;
2. Distributed Cluster Head Selection: Development of distributed algorithms for deciding cluster-heads for decision fusion.
So far, the project has delivered several algorithms for data-driven sensor fusion in local sensor networks in presence of environmental interference. Furthermore, we have been able to develop algorthms for energy management in sensor networks.